3D Surround Scanner
Time-of-Flight (ToF) based 3D spatial mapping device capable of generating real-time point cloud representations through multi-axis coordinate scanning and computational surface reconstruction.
3D Surround Scanner
A real-time 3D spatial mapping and object tracking system developed using Time-of-Flight (ToF) sensing, precision-controlled stepper motors, and computational point cloud reconstruction techniques.
Overview
This project was developed as part of the Electronic Design Realization module at the University of Moratuwa. The system was designed to capture spatial depth information from surrounding environments and reconstruct them into a 3D representation using coordinate transformation and point cloud processing techniques.
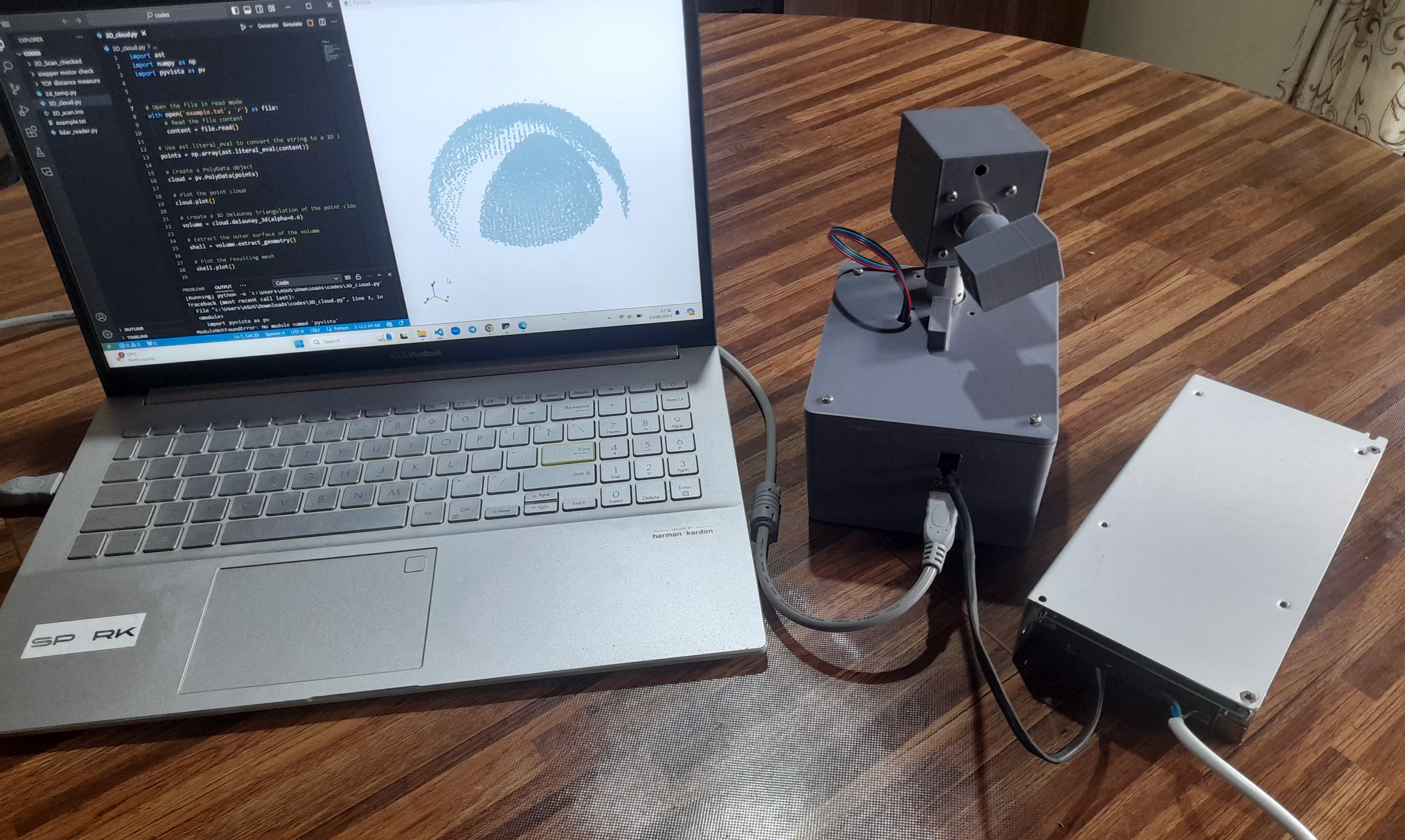
The scanner combines a ToF distance sensing module with a dual-axis rotational mechanism powered by stepper motors, enabling accurate acquisition of radial and angular measurements across multiple scanning planes. The captured data is transmitted to a computer through USB communication and processed into spatial point clouds for visualization and analysis.
 Scanner
Scanner
Key Features
- Real-time 3D environment scanning
- Time-of-Flight based depth acquisition
- Dual-axis rotational scanning mechanism
- Coordinate mapping using angular transformations
- Point cloud generation and visualization
- Embedded custom PCB design
- Custom SolidWorks enclosure and mechanical assembly
- USB-based data transmission pipeline
System Architecture
The system architecture integrates:
- Time-of-Flight (ToF) sensor modules
- Stepper motor controlled rotational stages
- Embedded microcontroller system
- Custom-designed PCB
- Power regulation circuitry
- Computer-side point cloud processing software
The rotational mechanism enables the sensor to capture spatial measurements from multiple orientations, allowing reconstruction of surrounding geometry in 3D space.
Engineering Contributions
Embedded Systems
- Designed the microcontroller-based control architecture
- Implemented motor control and sensor interfacing
- Developed communication pipeline for data transmission
PCB Design
- Designed a custom PCB including:
- MCU subsystem
- Power regulation circuitry
- Sensor interfaces
- Motor driver connectivity
- Performed component placement and routing
Mechanical Design
- Designed the enclosure and structural components using SolidWorks
- Created:
- Sensor mounting structures
- Cooling and ventilation layout
- Modular assembly design
- Internal component placement system
Computational Processing
- Generated spatial coordinate mappings from sensor measurements
- Processed scan data into 3D point clouds
- Applied geometric reconstruction concepts for environment visualization
Challenges
- Achieving stable and accurate rotational positioning
- Synchronizing sensor measurements with motor movement
- Managing noise and inconsistencies in depth readings
- Optimizing mechanical alignment for precise scanning
- Designing compact PCB and enclosure layouts
Technologies Used
Hardware
- Time-of-Flight Sensors
- Stepper Motors
- Embedded Microcontroller
- Custom PCB
Software & Tools
- SolidWorks
- PCB Design Tools
- Embedded C / Firmware Development
- Point Cloud Processing Algorithms
Applications
Potential applications include:
- Robotics and autonomous navigation
- Indoor spatial mapping
- Object tracking systems
- Environment reconstruction
- Smart surveillance systems
- Educational and research applications
Outcome
The project successfully demonstrated a functional prototype capable of capturing and reconstructing 3D spatial information using rotational ToF scanning and computational point cloud generation techniques.